离散结构代写 Discrete Structures代写 CS代写 Exercise代写
1324CS 2100: Discrete Structures Homework 7 离散结构代写 Section 5.1 1. Exercise 3.d on page 515. Refer to the graph G2 below. Construct a second graph H with the same number of nodes and ed...
View detailsSearch the whole station
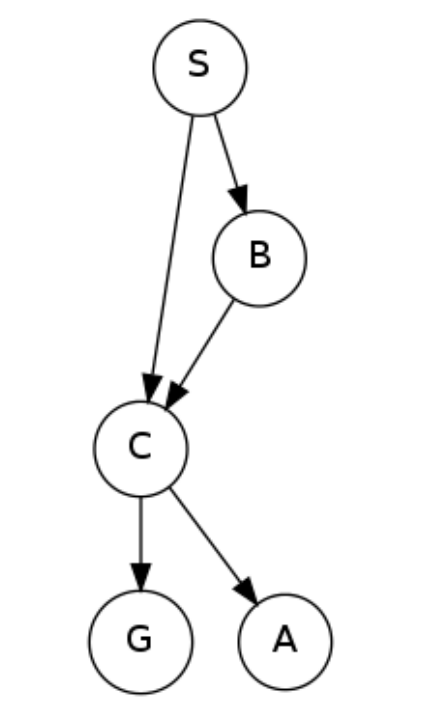
人工智能作业代写 Q1 Search Trees 4 Points How many nodes are in the complete search tree for the given state space graph? The start state is S.
4 Points
How many nodes are in the complete search tree for the given state space graph? The start state is S. You may find it helpful to draw out the search tree on a piece of paper.
4 Points
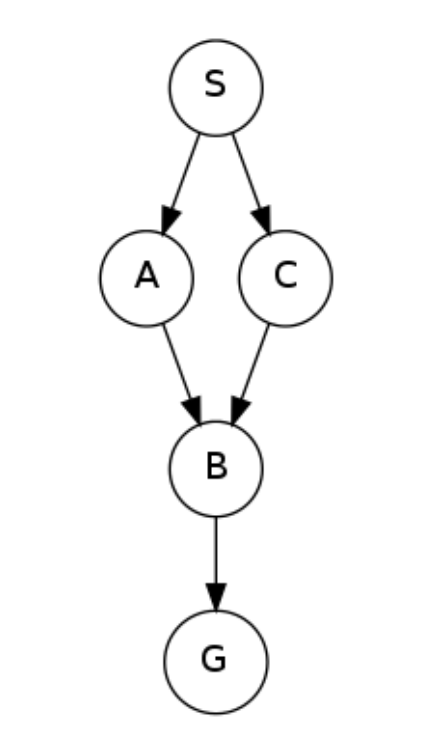
Consider a depth-first graph search on the graph below, where S is the start and G is the goal state. Assume that ties are broken alphabetically (so a partial plan S->X->A would be expanded before S->X->B and S->A->Z would be expanded before S->B->A). You may find it helpful to execute the search on scratch paper.
Please enter the final path returned by depth-first graph search in the box below. Your answer should be a string with S as your first character and G as your last character. Don’t include arrows or spaces in your submission. For example, if you believe the path is S->X->G, please enter SXG in the box.
4 Points
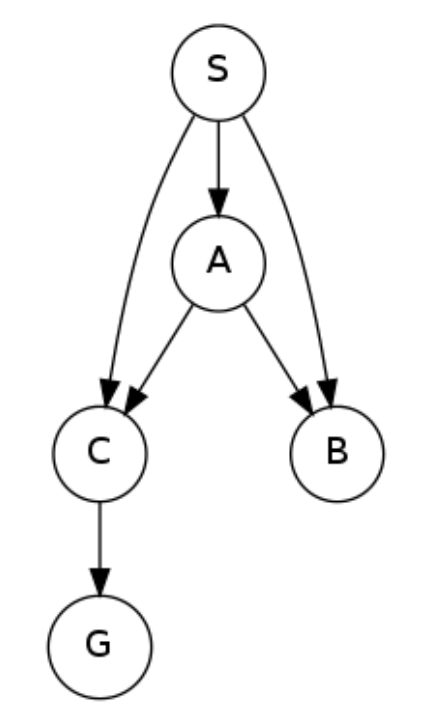
Consider a breadth-first graph search on the graph below, where S is the start and G is the goal state. Assume that ties are broken alphabetically (so a partial plan S->X->A would be expanded before S->X->B and S->A->Z would be expanded before S->B->A). You may find it helpful to execute the search on scratch paper.
Please enter the final path returned by breadth-first graph search in the box below. Your answer should be a string with S as your first character and G as your last character. Don’t include arrows or spaces in your submission.
For example, if you believe the path is S->X->G, please enter SXG in the box.
4 Points
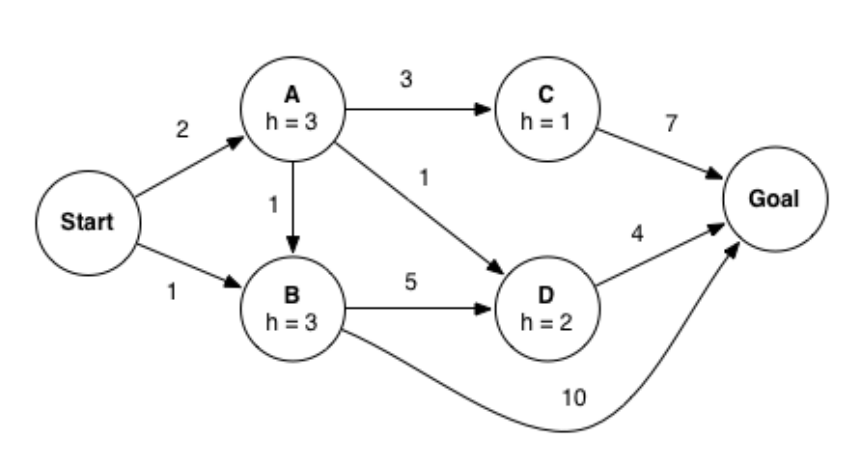
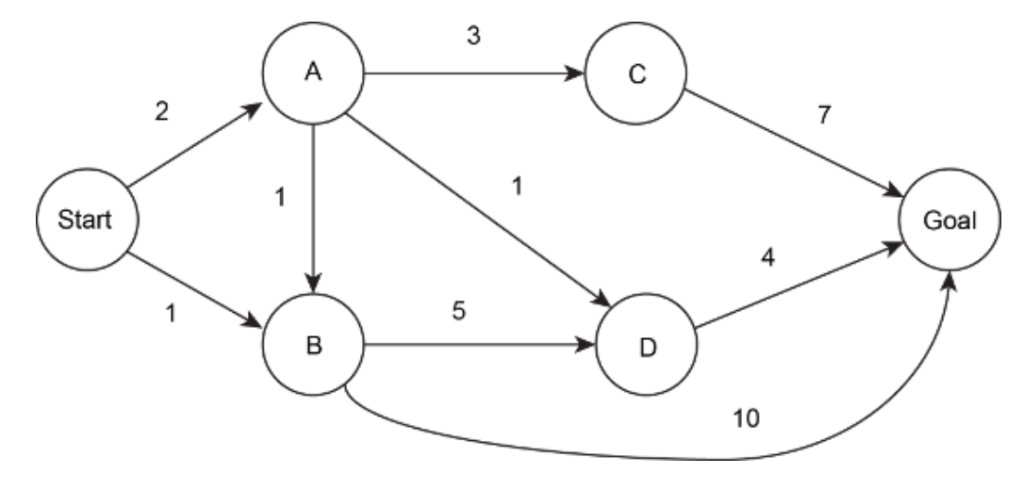
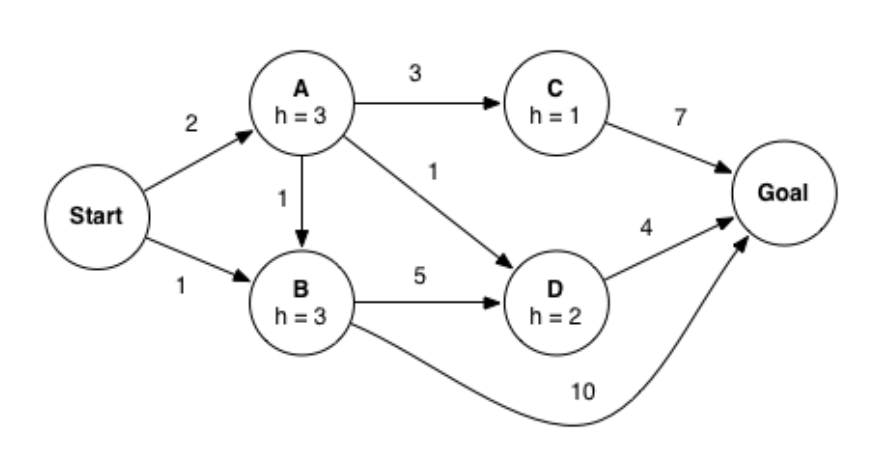
Consider A* graph search on the graph below. Arcs are labeled with action costs and states are labeled with heuristic values. Assume that ties are broken alphabetically (so a partial plan S->X->A would be expanded before S->X->B and S->A->Z would be expanded before S->B->A.
2 Points
In what order are states expanded by A* graph search? You may find it helpful to execute the search on scratch paper.
2 Points
What path does A* graph search return?
4 Points
Consider the graph below. Arcs are labeled with their weights. Assume that ties are broken alphabetically (so a partial plan S->X->A would be expanded before S->X->B and S->A->Z would be expanded before S->B->A.
2 Points
In what order are states expanded by Uniform Cost Search? You may find it helpful to execute the search on scratch paper.
2 Points
What path does uniform cost search return?
7 Points
Introduction
The next five questions share a common setup. You control one or more insects in a rectangular maze-like environment with dimensions M times N , as shown in the figure below.
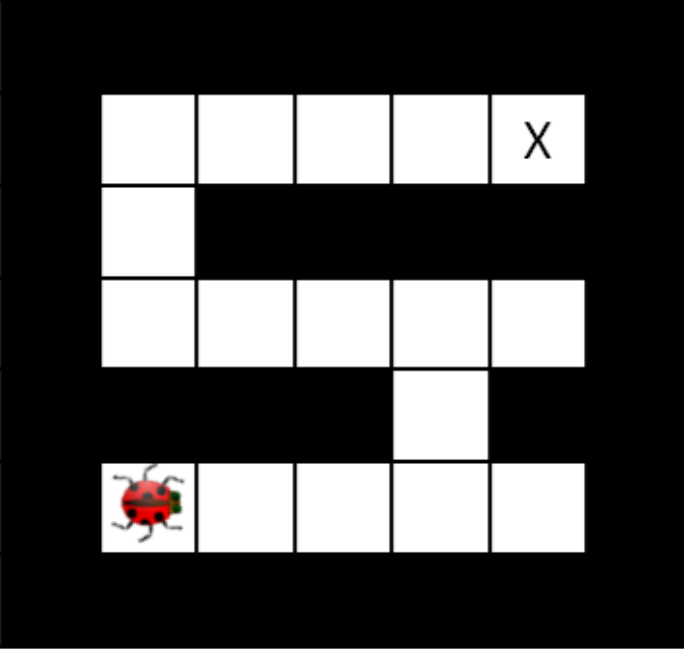
At each time step, an insect can either (a) move into an adjacent square if that square is currently free, or (b) stay in its current location. Squares may be blocked by walls, but the map is known. Optimality is always in terms of time steps; all actions have cost 1 regardless of the number of insects moving or where they move.
For each of the five questions, you should answer for a general instance of the problem, not simply for the example maps shown.
Problems
For this problem, you control a single insect as shown in the maze above, which must reach a designated target location X, also known as the hive. There are no other insects moving around.
3 Points
Which of the following is a minimal correct state space representation?
2 Points
What is the size of the state space?
Q6.3
2 Points
Which of the following heuristics are admissible (if any)?
6 Points
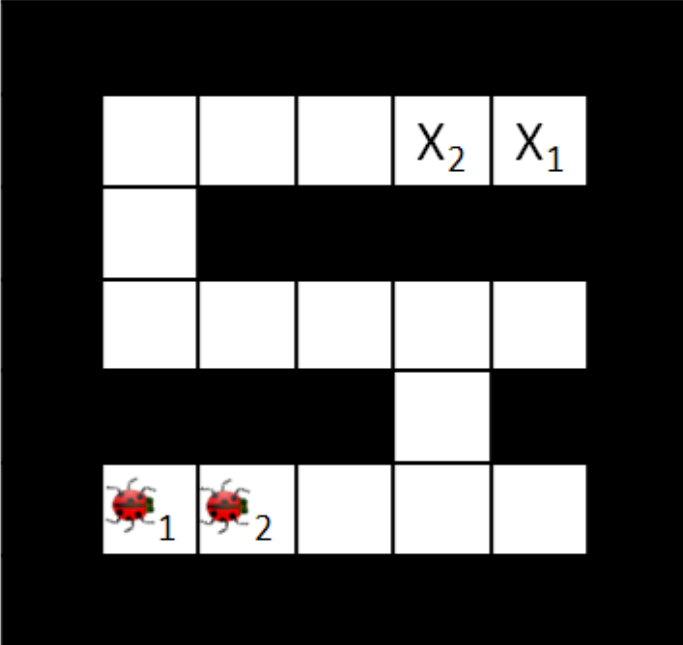
You control K insects, each of which has a specific target ending location Xk . No two insects may occupy the same square. In each time step all insects move simultaneously to a currently free square (or stay in place); adjacent insects cannot swap in a single time step.
2 Points
Which of the following is the smallest correct state space representation?
2 Points
What is the size of the above state space?
2 Points
Which of the following heuristics are admissible (if any)?
6 Points
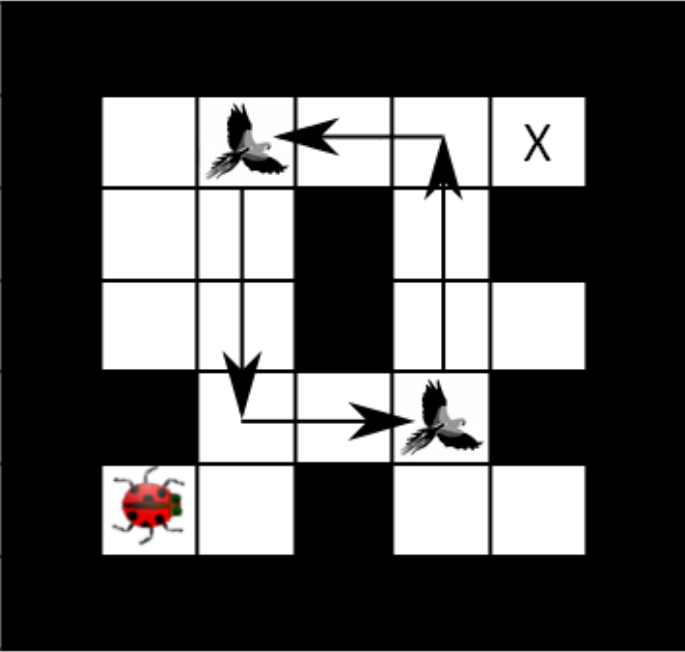
You again control a single insect, but there are B birds flying along known paths. Specifically, at time t each bird b will be at position (xb(t), yb (t)) . The tuple of bird positions repeats with period T . Birds might move up to 3 squares per time step. An example is shown below, but keep in mind that you should answer for a general instance of the problem, not simply the map and path shown below.
Your insect can share squares with birds and it can even hitch a ride on them!
On any time step that your insect shares a square with a bird, the insect may either move as normal or move directly to the bird’s next location (either action has cost 1, even if the bird travels farther than one square).
2 Points
Which of the following is a minimal state representation?
2 Points
Which of the following is the size of the state space?
2 Points
Which of the following heuristics are admissible (if any)?
4 Points
Your single insect is alone in the maze again. This time, it has super legs that can take it as far as you want in a straight line in each time step. The disadvantage of these legs is that they make turning slower, so now it takes the insect a time step to change the direction it is facing. Moving v squares requires that all intermediate squares passed through, as well as the vth square, currently be empty. The cost of a multi-square move is still 1 time unit, as is a turning move. As an example, the arrows in the maze below indicate where the insect will be and which direction it is facing after each time step in the optimal (fewest time steps) plan (cost 5):
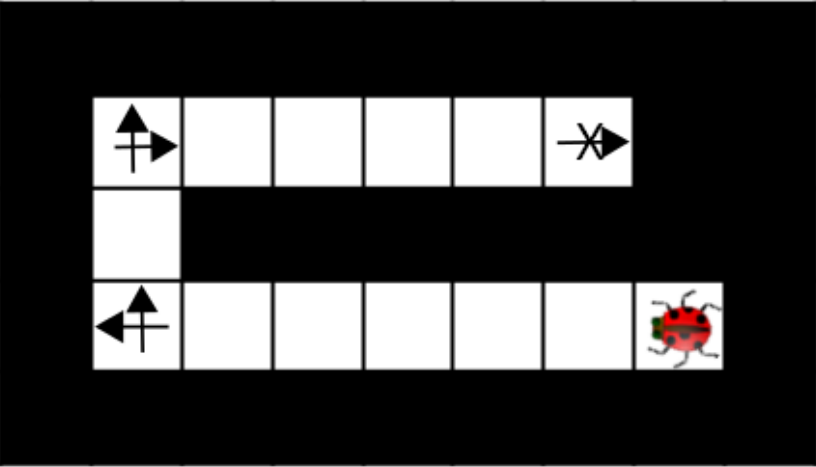
2 Points
Which of the following is a minimal state representation?
2 Points
What is the size of the state space?
6 Points
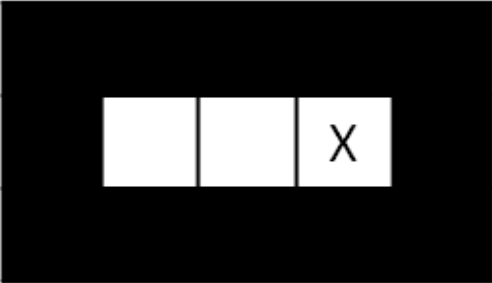
It is night and you control a single insect. You know the maze, but you do not know what square the insect will start in. You must pose a search problem whose solution is an all-purpose sequence of actions such that, after executing those actions, the insect is guaranteed to be on the exit square, regardless of initial position. The insect executes the actions mindlessly and does not know whether its moves succeed: if it uses an action which would move it in a blocked direction, it will stay where it is. For example, in the maze below, moving right twice guarantees that the insect will be at the exit regardless of its starting position.
2 Points
Which of the following state representations could be used to solve this
problem?
2 Points
What is the size of the state space?
2 Points
Which of the following are admissible heuristics?
7 Points
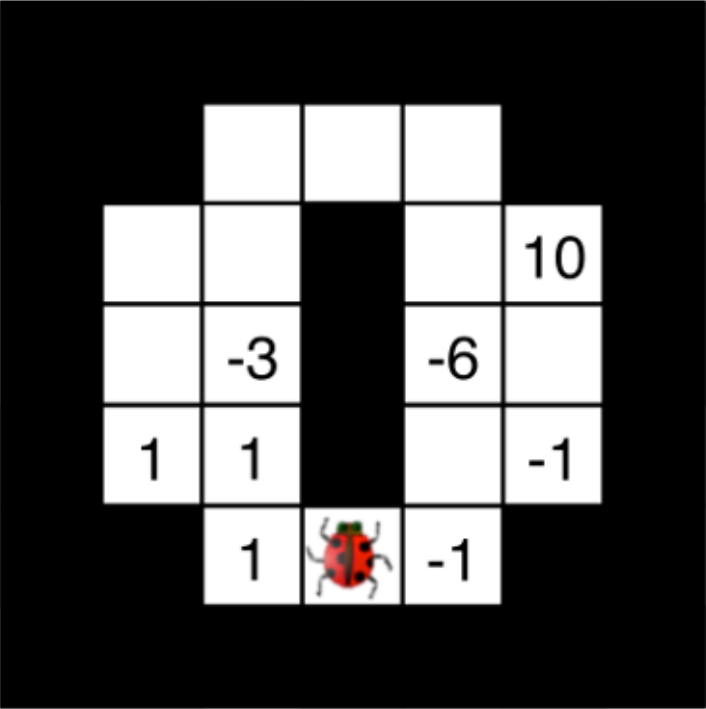
In this problem, the ladybug has a limited number of timesteps remaining. For each timestep, there is no moving penalty, but the remaining time will decrease by one. The ladybug will gain or lose points when it lands on positive or negative values, respectively. The ladybug must move to a new square for each timestamp, and the ladybug cannot move to a square that it has already visited.
Your goal in this problem is to find the optimal score (higher is better) for a given timestep limit.
Q11.1
1 Point
What is the optimal score for a timestep of 2?:
Q11.2
2 Points
What is the optimal score for a timestep of 5?:
Q11.3
2 Points
What is the optimal score for a timestep of 8?:
Q11.4
2 Points
What is the optimal score for a timestep of 11?:
6 Points
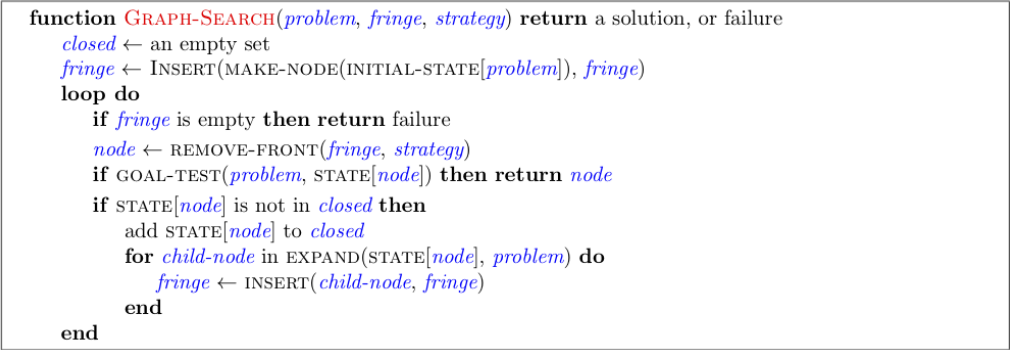
Recall from lecture the general algorithm for GRAPH-SEARCH reproduced below.
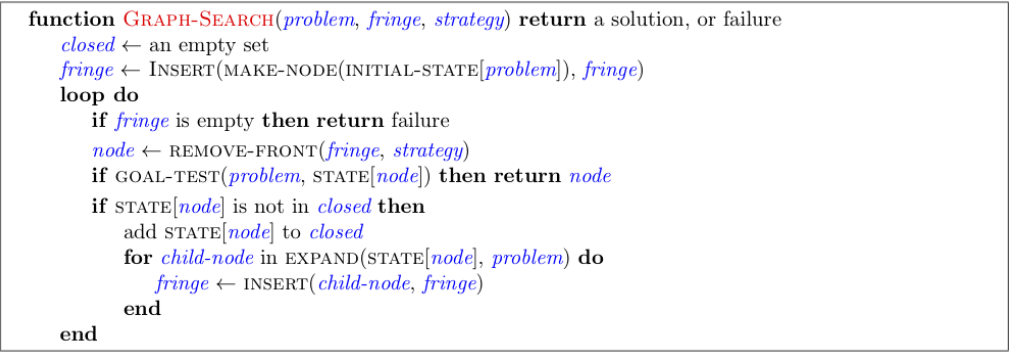
With the above implementation a node that reaches a goal state may sit on the fringe while the algorithm continues to search for a path that reaches a goal state.
Let’s consider altering the algorithm by testing whether a node reaches a goal state when inserting into the fringe.
Concretely, we add the line of code highlighted below:
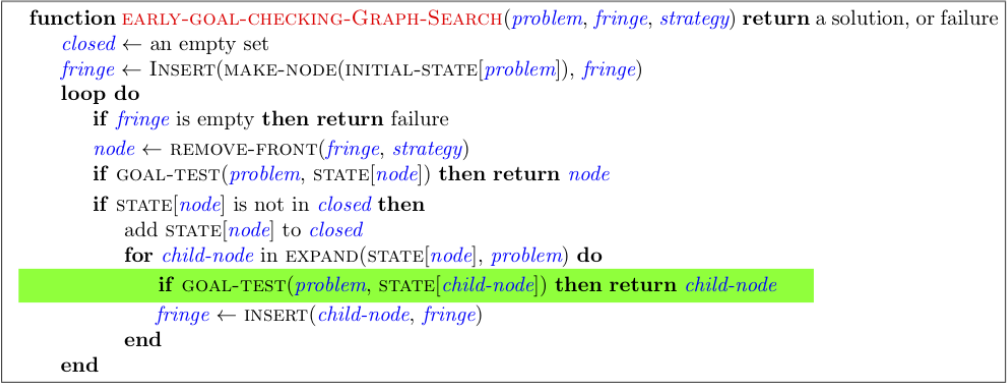
Now, we’ve produced a graph search algorithm that can find a solution faster.
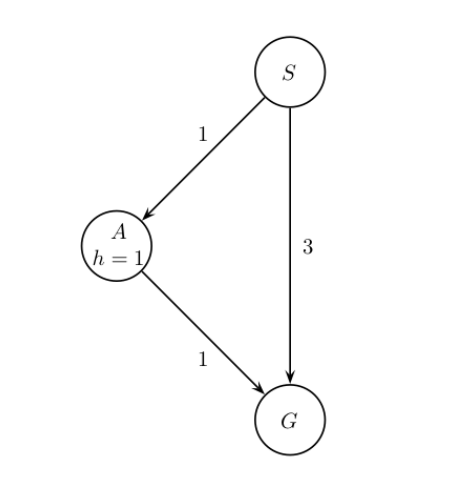
However, In doing so we might have affected some properties of the algorithm. To explore the possible differences, consider the example graph below.
Q12.1
1 Point
If using EARLY-GOAL-CHECKING-GRAPH-SEARCH with a Uniform Cost node expansion strategy, which path, if any, will the algorithm return?
Q12.2
1 Point
If using EARLY-GOAL-CHECKING-GRAPH-SEARCH with an A* node expansion strategy, which path, if any, will the algorithm return?
Q12.3
2 Points
Assume you run EARLY-GOAL-CHECKING-GRAPH-SEARCH with the Uniform Cost node expansion strategy, select all statements that are true.
Q12.4
2 Points
Assume you run EARLY-GOAL-CHECKING-GRAPH-SEARCH with the A* node expansion strategy and a consistent heuristic, select all statements that are true.
5 Points
Recall from lecture the general algorithm for Graph Search reproduced below.
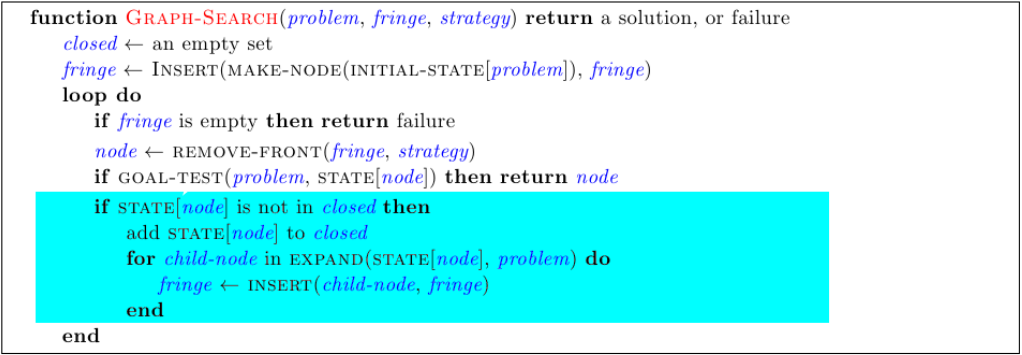
Using GRAPH-SEARCH, when a node is expanded it is added to the closed set.
This means that even if a node is added to the fringe multiple times it will not be expanded more than once. Consider an alternative version of GRAPH-SEARCH, LOOKAHEAD-GRAPH-SEARCH, which saves memory by using a “fringe-closed-set” keeping track of which states have been on the fringe and only adding a child node to the fringe if the state of that child node has not been added to it at some point. Concretely, we replace the highlighted block above
with the highlighted block below.
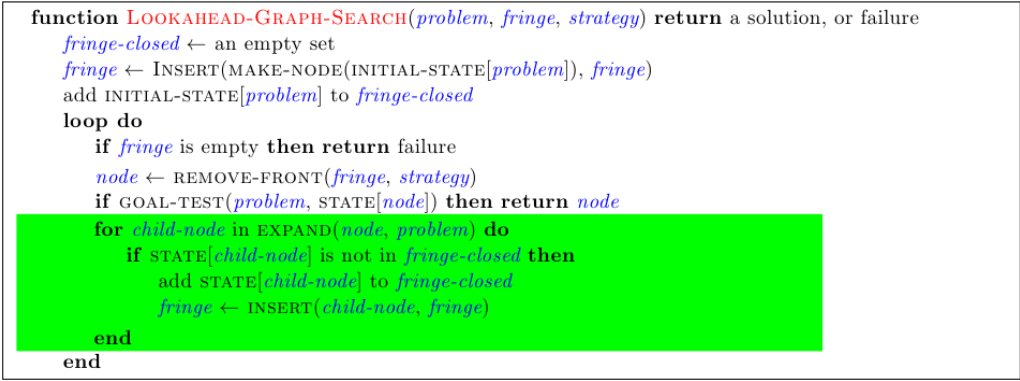
Now, we’ve produced a more memory efficient graph search algorithm.
However, in doing so, we might have affected some properties of the algorithm. To explore the possible differences, consider the example graph below.
2 Points
If using LOOKAHEAD-GRAPH-SEARCH with an A* node expansion strategy, which path will this algorithm return? (We strongly encourage you to step through the execution of the algorithm on a scratch sheet of paper and keep track of the fringe and the search tree as nodes get added to the fringe.)
3 Points
Assume you run LOOKAHEAD-GRAPH-SEARCH with the A* node expansion strategy and a consistent heuristic, select all statements that are true.
5 Points
Recall from lecture the general algorithm for GRAPH-SEARCH reproduced below.
Using GRAPH-SEARCH, when a node is expanded it is added to the closed set. This means that even if a node is added to the fringe multiple times it will not be expanded more than once. Consider an alternate version of GRAPH-
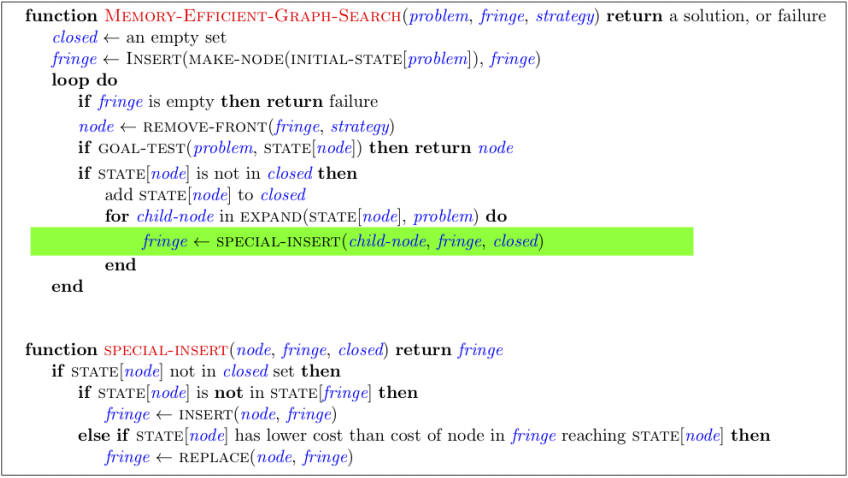
SEARCH, MEMORY-EFFICIENT-GRAPH-SEARCH, which saves memory by
(a) not adding node n to the fringe if STATE[n] is in the closed set, and
(b) checking if there is already a node in the fringe with last state equal to STATE[n]. If so, rather than simply inserting, it checks whether the old node or the new node has the cheaper path and then accordingly leaves the fringe unchanged or replaces the old node by the new node.
By doing this the fringe needs less memory, however insertion becomes more computationally expensive.
More concretely, MEMORY-EFFICIENT-GRAPH-SEARCH is shown below with the changes highlighted.
Now, we’ve produced a more memory efficient graph search algorithm.
However, in doing so, we might have affected some properties of the algorithm. Assume you run MEMORY-EFFICIENT-GRAPH-SEARCH with the A* node expansion strategy and a consistent heuristic, select all statements that are true.
更多代写:美国留学生CS代考价格 线上考试如何作弊 英国社会心理学作业代写 人物论文代写 商业文章代写 代写论文技巧
合作平台:essay代写 论文代写 写手招聘 英国留学生代写

CS 2100: Discrete Structures Homework 7 离散结构代写 Section 5.1 1. Exercise 3.d on page 515. Refer to the graph G2 below. Construct a second graph H with the same number of nodes and ed...
View details
INFOSYS 110-1213 信息系统代写 Instructions: You must answer ALL parts of ALL questions in this exam, based on information given in the Exam Case. Type your answers into the Instructions: ...
View details
COMP 424 Final Project Game: Colosseum Survival! AI算法代写 1.Goal The main goal of the project for this course is to give you a chance to play around with some of the AI algorithms discuss...
View details
CS 771 Artificial Intelligence Homework 1 (50 points) 人工智能代写 1.For each of the following assertions, say whether it is true or false and support your answer with examples or counterexa...
View details