线性代数代写 数学代写 考试代写 EXAM代写
737MAT224H5Y EXAM 线性代数代写 Question 1. (40 Marks) This question consists of 20 multiple choice questions. Answer each question and put your answer in the table below. Question 1. (40 Marks...
View detailsSearch the whole station
机器人视觉代写 1. (a) Describe a pinhole camera. [3%] Describe the role of lenses in cameras. [3%] What is a chromatic aberration? What causes it? [2%]
No Calculator permitted in this examination
Time allowed: 1 hr 30 min
[Answer ALL Questions]No Calculator
(a) Describe a pinhole camera. [3%]
(b) Describe the role of lenses in cameras. [3%]
(c) What is a chromatic aberration? What causes it? [2%]
(d) What is vignetting? What does it cause? [2%]
(a) Describe “kernel separability” and its importance for image filtering. [5%]
(b) For the kernel given below determine if it is separable. Justify your answer. [5%]
-1 -2 -1
2 4 2
3 6 3
(a) In pseudocode, describe the Hough transform for detecting circles with fixed radii. [7%]
(b) Demonstrate the algorithm on a pair of points A=(3,4) and B=(5,4) for the values of radii r=1 and r=2. Map the two points into the parametric space. What can we infer about the points A and B from the analysis of the parametric space? [8%]
(a) In pseudocode, describe RANSAC for a general case of searching for the best model in the set of data. [10%]
(b) Explain the role of RANSAC parameters. [5%]
(a) Describe the process of detecting interest points with a DoG (Difference of Gaussians) pyramid (as proposed by Lowe). [10%]
(b) How do we achieve in-image-plane rotational invariance of a SIFT descriptor? [5%]
(a) Given the sketch of a two-camera system (Ol, Or denote the left centre and the right centre of the cameras, respectively), and a 3D point P, draw and explain the terms epipols, epipolar plane, and epipolar lines that correspond to the point. [10%]
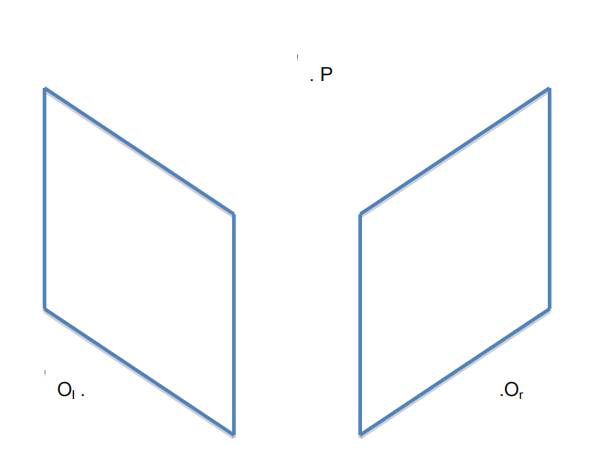
(b) A mobile robot is equipped with two cameras (assume a pinhole model). The optical axes of the cameras are parallel and lie on a horizontal plane. The baseline between the cameras is 12 cm. The disparity of a point T in space is 16 mm. When the robot moves 20 cm in the viewing direction, the disparity increases to 30 mm. Calculate the focal length. [10%]
(a) Describe the steps involved in object learning and recognition using PCA. [10%]
(b) Describe object learning and categorization using “bag of features”. [5%]
更多代写:R语言代写 多邻国代考 英国毕业论文代寫 留学商科essay his历史学写作 会计网课代修
合作平台:essay代写 论文代写 写手招聘 英国留学生代写

MAT224H5Y EXAM 线性代数代写 Question 1. (40 Marks) This question consists of 20 multiple choice questions. Answer each question and put your answer in the table below. Question 1. (40 Marks...
View details
Final Exam 计算机考试代写 Qestion 1 Comments in LC-3 Assembly Language are indicated using the ampersand (&). True False Question 2 A compiler is used Question 1 Comments ...
View details
Quiz 1 on "Smart Connected Products" and "Enabling The Internet of Things" 物联网quiz代写 说明 This is Quiz 1 on "Smart Connected Products" and "Enabling the Internet of Things". The last ques...
View details
MICROECONOMICS 微观经济学代写 1. According to the theory of firm, which of the following statements is not correct? a. AC = unit cost considering all produced units READ CAREFULY AND FOLLOW ...
View details